


معجزه حفظ تعادل؛ سنسور IMU

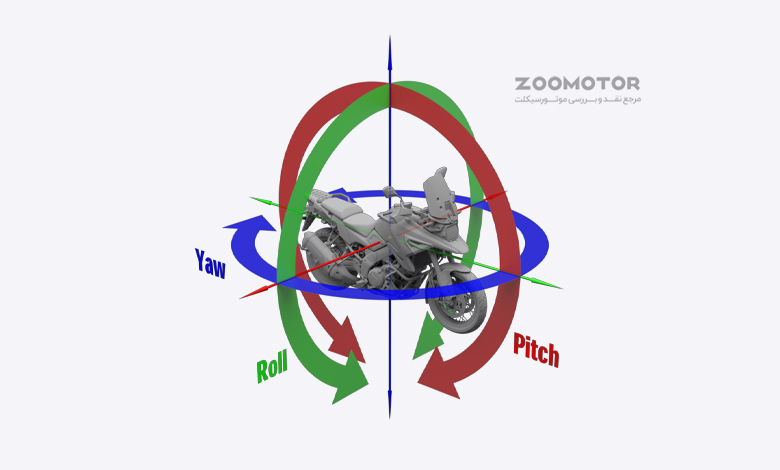
موتورسیکلتها بر خلاف خودروها، وسایل نقلیهای هستند که برای حرکت و پایداری در مسیرهای مختلف به آزادی حرکتی پیچیدهای در سه بعد فضایی نیاز دارند. یک موتورسیکلت در حین حرکت مدام در حال خوابیدن به طرفین (Roll)، نوسان دماغه به بالا و پایین (Pitch) و انحراف یا چرخش حول محور عمودی (Yaw) است.
در دهههای گذشته، سیستمهای کمکی اولیه مانند ترمزهای ضد قفل (ABS) سنتی تنها بر اساس سرعت دوران چرخها تصمیمگیری میکردند و هیچ درکی از زوایای شاسی نسبت به سطح زمین نداشتند. این نقیصه فیزیکی با توسعه فناوری مدرنی به نام سنسور IMU در موتورسیکلت برطرف شد.

این سیستم هوشمند که به عنوان «گوش داخلی» و مغز متفکر مدارهای الکترونیکی موتورسیکلت شناخته میشود، رفتارهای دینامیکی وسیله نقلیه را با فرکانس بسیار بالا پایش کرده و اطلاعات حیاتی را به کامپیوتر مرکزی ارسال میکند. در این گزارش فنی و جامع، ساختار فیزیکی، الگوریتمهای محاسباتی، نقش سختافزاری سنسور IMU و تاثیر شگرف آن بر پایداری و ایمنی موتورسیکلتهای مدرن به طور دقیق کالبدشکافی میشود.

تاریخچه و ضرورت توسعه سیستم IMU در موتورسیکلت
موتورسواران باسابقه به خوبی میدانند که ترمزگیری شدید یا گاز دادن ناگهانی در میانه یک پیچ تند تا چه حد میتواند چالشبرانگیز و خطرناک باشد. سیستمهای الکترونیکی اولیه نظیر ترمز ABS یا سیستم کنترل کشش (Traction Control) سنتی، ماهیتی کاملاً «غیرفعال» یا واکنشگرا داشتند. بدین معنا که این سیستمها ابتدا منتظر میماندند تا چرخ عقب دچار هرزگردی شود یا چرخ جلو قفل گردد و سپس وارد عمل میشدند.
از الکترونیک غیرفعال تا کنترلهای تطبیقی هوشمند
سیستمهای واکنشگرای قدیمی در مسیرهای مستقیم عملکرد مناسبی داشتند، اما در سر پیچها، اعمال ناگهانی ترمز یا گشتاور موتور به سرعت لاستیک را از محدوده چسبندگی مجاز خارج میکرد و منجر به سقوط راکب میشد. محققان سوانح جادهای کمپانی بوش در سال ۲۰۰۸ به این نتیجه رسیدند که برای جلوگیری از این قبیل حوادث، الگوریتمهای کنترلی باید به جای «واکنش پس از خطا»، رفتار حرکتی موتورسیکلت را «پیشبینی» کنند.
این پیشبینی هوشمندانه مستلزم داشتن درک لحظهای از زاویه خوابیدن موتورسیکلت، شتابهای جانبی و نیروهای گرانشی بود. بدین ترتیب، ایده یکپارچهسازی سیستم IMU در موتورسیکلت شکل گرفت.
نخستین گامهای سنسور IMU در پیستهای مسابقه و انتقال به دنیای خیابانی
فناوری حسگرهای اینرسی در ابتدا برای مصارف نظامی و ناوبری هوانوردی توسعه یافته بودند. اولین حضور جدی این حسگر در دنیای دوچرخها به سال ۲۰۰۸ بازمیگردد؛ جایی که تیم مسابقات یاماها (Yamaha Racing) برای اولین بار این پلتفرم اینرسیایی را روی موتورسیکلت افسانهای YZR M1 متعلق به والنتینو روسی در مسابقات MotoGP آزمایش کرد.

موفقیت بینظیر سنسور IMU در مدیریت گشتاور و ترمزگیری در زوایای تند، راه را برای ورود تجاری آن به بازار عمومی هموار ساخت. در سال ۲۰۱۵، یاماها YZF-R1 به عنوان نخستین سوپربایک خیابانی مجهز به سنسور IMU شش محوره فیزیکی معرفی شد و استانداردهای جدیدی را در کنترل کشش و پایداری تعریف کرد.

سنسور IMU در موتورسیکلت چیست و چطور کار میکند؟
واحد اندازهگیری اینرسی یا همان IMU (Inertial Measurement Unit)، یک پلتفرم حسگر پیشرفته است که شتاب خطی و سرعت زاویهای را در سه راستای فضایی متعامد اندازهگیری میکند. برخلاف سنسورهای سرعت چرخ که صرفاً نرخ چرخش تایرها را ثبت میکنند، سیستم IMU در موتورسیکلت حرکت کلی بدنه و شاسی را در فضا پایش مینماید.
پلتفرم ناوبری اینرسی (INS) و الگوریتمهای مکانیابی
اطلاعات خروجی حاصل از سنسور IMU مستقیماً به سیستم ناوبری اینرسیایی (INS) ارسال میشود. سیستم INS با اطلاع از مقادیر اولیه موقعیت، سرعت و وضعیت موتورسیکلت، دادههای دریافتی از شتابسنجها و ژیروسکوپها را ترکیب کرده و با استفاده از الگوریتم محاسباتی ویژهای به نام Mechanization، موقعیت و زاویه لحظهای موتورسیکلت را به طور آنی محاسبه میکند.
در فیزیک مکانیک، وضعیت لحظهای یک جسم صلب در فضا با زوایای اویلر (Euler Angles) یعنی رول، پیچ و یاو توصیف میشود. برای استخراج سرعت زاویهای و وضعیت، سیستم باید نسبت به زمان انتگرالگیری ریاضی انجام دهد. به عنوان نمونه، سرعت زاویهای (omega) به زاویه لحظهای (theta) تبدیل میشود:
در یک سنسور IMU مدرن ۲۰۰ هرتز، دوره نمونهبرداری معادل ۵ میلیثانیه است؛ یعنی در هر ثانیه ۲۰۰ مرتبه تمام شتابها و سرعتهای دورانی اندازهگیری شده و انتگرال فوق محاسبه میگردد تا کوچکترین انحراف بدنه به سرعت کشف شود.
سنسور IMU به عنوان گوش داخلی موتورسیکلت
همانگونه که مغز انسان برای حفظ تعادل و درک موقعیت سر در فضا به مایع و مجاری نیمدایرهای گوش داخلی متکی است، کامپیوتر مرکزی موتورسیکلت (ECU) نیز برای فهم موقعیت شاسی به سنسور IMU در موتورسیکلت تکیه دارد. بدون وجود این سیستم، کامپیوتر موتورسیکلت در مواجهه با شرایط بحرانی مانند بلند شدن چرخ عقب یا هرزگردی در سر پیچها کاملاً کور عمل میکند.

سنسور IMU اطلاعات مربوط به زوایای دقیق پلتفرم را زمانحقیقی (Real-time) پردازش کرده و به خروجی دیجیتال فرستاده تا تصمیمگیریهای کنترلی اتخاذ شوند.
کالبدشکافی قطعات و معماری سختافزاری سنسور IMU
یک واحد اندازهگیری اینرسی فیزیکی مدرن از چندین جزء الکترونیکی و مکانیکی مینیاتوری در قالب یک تراشه مجتمع (System-in-Package یا SiP) تشکیل شده است. این اجزا به شرح زیر هستند:
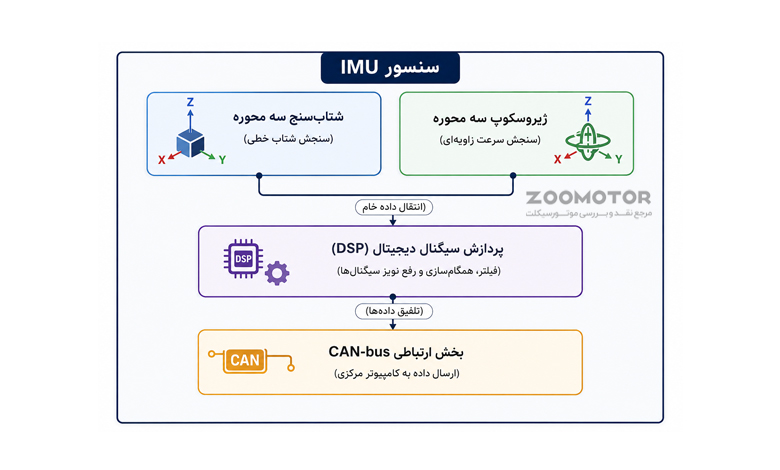
شتابسنجهای خطی؛ پایش شتاب در سه محور متعامد
شتابسنجهای موجود در سنسور IMU شتابهای خطی وارد بر موتورسیکلت را در سه راستای اصلی اندازهگیری میکنند :
- محور طولی (X): شتاب حاصل از گاز دادن (شتاب مثبت) یا ترمزگیریهای شدید (شتاب منفی).
- محور عرضی (Y): شتابهای جانبی وارده در حین حرکت و تمایل به گریز از مرکز.
- محور عمودی (Z): شتابهای ناشی از دستاندازها، پستی و بلندی جاده و جاذبه زمین.
این سنسورها شتابهای خطی را به سیگنالهای ولتاژ تبدیل کرده و پس از باینریسازی، در اختیار پردازندهها قرار میدهند. شتابسنجها در حالت سکون موتورسیکلت به عنوان شیبسنج عمل میکنند؛ به طوری که با اندازهگیری مولفههای بردار شتاب گرانش زمین (g)، زاویه دقیق شیب دستگاه ارزیابی میشود.
ژیروسکوپهای مکانیکی؛ اندازهگیری سرعت دورانی
ژیروسکوپها سرعت زاویهای دوران موتورسیکلت را حول سه محور فضایی به دقت میسنجند :
- محور رول (Roll): نرخ چرخش حول محور طولی که میزان خوابیدن موتورسیکلت به پهلوها را مشخص میکند.
- محور پیچ (Pitch): نرخ دوران حول محور عرضی که برای پایش رفتارهایی نظیر بلند شدن چرخ جلو (تکچرخ) یا چرخ عقب به کار میرود.
- محور یاو (Yaw): نرخ انحراف و تغییر جهت حول محور عمودی که در زمان پیچیدن یا سر خوردن عرضی چرخ عقب اهمیت دارد.
مغناطیسسنجها و بارومترها؛ پایش میدان مغناطیسی و ارتفاع
در برخی از سنسورهای مدرن حرکتی، سنسورهای کمکی دیگر نظیر مغناطیسسنج (برای پایش میدان مغناطیسی زمین به عنوان قطبنمای الکترونیکی) و حسگر فشار بارومتریک (جهت تخمین دقیقتر تغییرات ارتفاع موتورسیکلت در جادههای کوهستانی) تعبیه میشود تا صحت عملکرد الگوریتمهای ناوبری تضمین شود.
فناوری انقلابی MEMS؛ مینیاتوریسازی حسگرهای حرکتی
تولید شتابسنجها و ژیروسکوپهای سنتی به دلیل ابعاد بزرگ و وزن زیاد روی وسایل نقلیه سبک مانند موتورسیکلت عملاً غیرممکن بود. انقلاب واقعی با ظهور فناوری سیستمهای میکروالکترومکانیکی یا همان MEMS رقم خورد. ابعاد این سنسورها به قدری کوچک است که ساختار میکروسکوپی تراشه آنها در مقایسه با تار موی انسان بسیار ناچیز جلوه میکند.
فنرهای سیلیکونی و جابجاییهای خازنی
در داخل شتابسنجهای مبتنی بر فناوری MEMS، از بازوهای مینیاتوری و فنرهای ساخته شده از سیلیکون استفاده میشود. از آنجایی که سیلیکون در طول زمان دچار خستگی و استهلاک نمیشود، قابلیت اطمینان فوقالعاده بالایی دارد. با اعمال شتاب طولی یا عرضی، جرمی مینیاتوری حرکت کرده و موقعیت صفحات خازنی داخلی تغییر میکند. این تغییر در فاصله صفحات خازنی، ظرفیت خازنی کل را تغییر میدهد که بر اساس رابطه فیزیکی زیر تعریف میشود :
در این فرمول، C ظرفیت خازنی، epsilon ضریب گذردهی محیط، A مساحت موثر صفحات و d فاصله بین صفحات است. تغییر ظرفیت خازنی به سرعت به عنوان تغییر ولتاژ ثبت شده و با دقت میکرومتر جابجاییها محاسبه میشود.
شتاب کوریولیس و مهار فیزیکی نوسانات دورانی
ژیروسکوپهای MEMS فاقد دیسکهای دوار مرسوم فیزیکی هستند. این سنسورها متکی بر اصل شتاب کوریولیس بر روی جرمهای مقاوم در برابر ارتعاش طراحی شدهاند. هنگامی که شاسی موتورسیکلت میچرخد، جرم ارتعاشی داخلی تحت تاثیر نیروی کوریولیس دچار انحراف جانبی میشود. بردار شتاب کوریولیس ( a⃗c ) به صورت زیر محاسبه میگردد :
که در آن ω⃗ بردار سرعت زاویهای دوران سیستم و v⃗ بردار سرعت خطی جرم مرتعش داخلی است. با تبدیل این شتاب به تغییرات بار الکتریکی، سرعت دقیق دوران حول سه محور به دست میآید.
تفاوت فنی و ساختاری سنسور IMUهای ۵ محوره و ۶ محوره
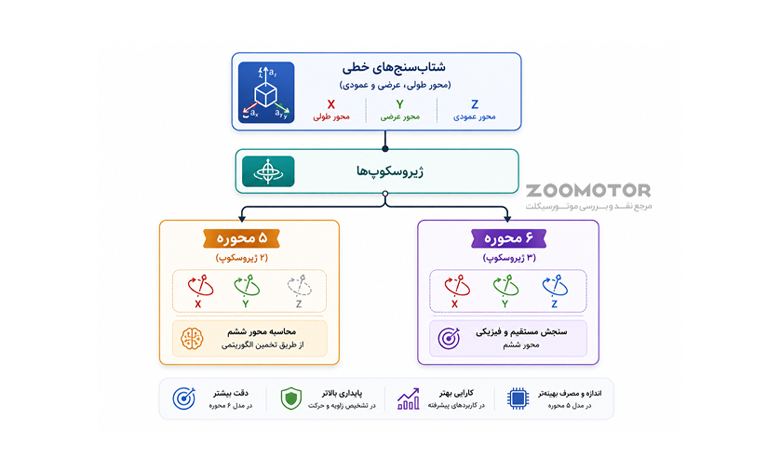
در کاتالوگ موتورسیکلتهای مجهز به سیستمهای کمکی راننده، همواره نوع سنسور به صورت ۵ محوره یا ۶ محوره درج میشود. این نامگذاری بازتابدهنده تعداد سنسورهای فیزیکی مستقل درون واحد سختافزاری است :
- سنسور IMU پنج محوره (5-Axis): شامل ۳ شتابسنج خطی (X, Y, Z) و ۲ ژیروسکوپ دورانی (معمولاً رول و پیچ) است.
- سنسور IMU شش محوره (6-Axis): شامل ۳ شتابسنج خطی و ۳ ژیروسکوپ دورانی کامل است که پوشش مستقیمی بر تمامی زوایای سهبعدی دارد.
عملکرد محاسباتی الگوریتمهای بوش در سیستمهای ۵ محوره
جالب است بدانید در نسلهای قبلی حسگرهای بوش نظیر ماژول پرکاربرد MM5.10، سختافزار دستگاه فاقد ژیروسکوپ فیزیکی برای محور سوم (Yaw) بود. مهندسان بوش این چالش را با طراحی یک الگوریتم ریاضی هوشمند حل کردند. این الگوریتم با مقایسه مقادیر شتابسنجها و سرعت دورانی دو محور دیگر، حرکت Yaw را با دقت مناسب شبیهسازی و بازسازی میکرد و خروجی معادل یک سیستم ششبعدی به کامپیوتر مرکزی ارائه میداد.
تحلیل مستقیم حرکات با ژیروسکوپهای کامل ۶ محوره
در سیستمهای ششمحوره فیزیکی کامل (مانند بوش MM7.10)، هیچگونه حدس یا تخمین الگوریتمی برای محور سوم وجود ندارد. تمامی نیروهای رول، پیچ و یاو به طور لحظهای و مستقیم توسط ژیروسکوپهای مجزا سنجش میشوند. این پایداری و دقت بالا به ویژه در پیچیدنهای بسیار تند با سرعتهای بالا در پیست مسابقات که زمان پاسخدهی میلیثانیهای اهمیت دارد، پایداری بهتری را تضمین مینماید.
| پارامتر فنی | سنسور بوش MM5.10 (۵ محوره) | سنسور بوش MM7.10 (۶ محوره) |
|---|---|---|
| سنسورهای فیزیکی | ۳ شتابسنج، ۲ ژیروسکوپ | ۳ شتابسنج، ۳ ژیروسکوپ |
| بازه سنجش سرعت زاویهای | ±163°/s |
±163°/s (قابلیت Overrange تا 1000°/s) |
| بازه سنجش شتاب خطی | ±4.2g |
±4.2g (قابلیت Overrange تا 20g) |
| پروتکل ارتباطی (CAN) | ۵۰۰ یا ۱۰۰۰ کیلوبیت بر ثانیه | ۵۰۰ یا ۱۰۰۰ کیلوبیت بر ثانیه |
| فیلترهای نویز داخلی | فیلتر پایینگذر تا ۱۵ هرتز |
فیلتر پایینگذر متغیر (۱۵، ۳۰ و ۷۰ هرتز) |
| وزن خالص سختافزار | بسیار سبک و فشرده | ۳۵ گرم (بدون کابلهای اتصال) |
سیستم کنترل پایداری موتورسیکلت (Bosch MSC)؛ محافظ نامرئی راکبان
بررسیهای آماری نشان میدهد که بیش از ۳۰ درصد از سوانح جرحی موتورسیکلتها را میتوان به کمک ترکیب ترمز ABS و سیستم کنترل پایداری هوشمند مهار کرد. پلتفرم انقلابی شرکت بوش موسوم به Motorcycle Stability Control (MSC) که نوعی سیستم ESP برای موتورسیکلتها به شمار میرود، پایداری راکب را در تمام جادههای مستقیم و مارپیچ تامین میکند.
محدودیتهای ترمز ABS معمولی در زمان پیچگیری
در ترمزهای ABS قدیمی، سیستم صرفاً بر اساس تفاوت سرعت چرخ جلو و عقب عمل میکرد. در صورتی که موتورسیکلت در میانه یک پیچ تند خم شده باشد، چسبندگی جانبی تایرها به شدت تحت فشار نیروهای گریز از مرکز قرار میگیرد. ترمزگیری تند در این حالت سبب اعمال گشتاور برگرداننده به شاسی شده، تایر جلو چسبندگی خود را از دست میدهد و موتورسیکلت دچار پدیده افتادن به پهلو (Low-side crash) میشود.
نقش سنسور IMU در شکلگیری دایره چسبندگی تایرها
سیستم کنترل پایداری MSC با خوانش دادههای زاویه رول و پیچ از سنسور IMU متوجه انحنای حرکتی و زاویه مایل تایرها نسبت به آسفالت میشود. سیستم با درک این اطلاعات دینامیکی، حداکثر چسبندگی مجاز تایر را محاسبه کرده و فشار ترمز را به نحوی تعدیل میکند که توزیع بهینهای از نیروی ترمز بین چرخ جلو و عقب برقرار شود. این مداخله هوشمند مانع از قفل شدن لاستیکها یا انحراف چرخ عقب شده و پایداری راکب را در بدترین شرایط جوی و جادهای حفظ میکند.



تشریح کامل تمام عملکردهای ایمنی و پایداری مبتنی بر سنسور IMU
تلفیق دادههای دینامیکی صادر شده از سیستم IMU در موتورسیکلت با ECU پیشرانه و پمپ هیدرولیک ترمز، امکان اجرای طیف وسیعی از عملکردهای ایمنی را فراهم میآورد :
سیستم ترمز ضد قفل سر پیچ (Cornering ABS)
هنگامی که راکب در زاویه خمیدگی تند اقدام به فشردن شدید دسته ترمز میکند، سیستم ترمز ضد قفل سر پیچ (توسعهیافته بر پایه دادههای IMU) میزان فشار روغن ترمز را به طور مستقل در کالیپرهای جلو و عقب تغییر میدهد. این عملکرد مانع از کله کردن ناگهانی دماغه و بلند شدن چرخ عقب یا لیز خوردن جانبی میشود.
سیستم کنترل کشش هوشمند در پیچها (Cornering Traction Control)
هرزگردی چرخ عقب در خروجی پیچها به دلیل اعمال شتاب ناگهانی، دلیل اصلی سقوطهای شدید موتورسواران (High-side crash) است. سنسورهای اینرسیایی با تشخیص زاویه خوابیدن موتورسیکلت، به سیستم کنترل کشش اطلاع میدهند تا گشتاور موتور را پیش از وقوع هرزگردی کاهش دهد و چسبندگی چرخ عقب حفظ شود.
سیستم کنترل گشتاور پسا یا ترمز موتور (Cornering Drag Torque Control)
در زمان معکوس کشیدنهای تهاجمی در سر پیچها، دور موتور افت کرده و ترمز موتور شدیدی به چرخ عقب اعمال میشود که میتواند منجر به قفل شدن چرخ عقب یا دریفت ناخواسته گردد. IMU با پایش زوایا، به دریچه گاز برقی دستور باز شدن بسیار جزئی میدهد تا گشتاور منفی چرخ عقب خنثی شده و پایداری موتور به خطر نیفتد.
سیستم کنترل تکچرخ (Wheelie Control)
تکچرخ زدن یا بلند شدن چرخ جلو در موتورسیکلتهای پرقدرت در هنگام گاز دادنهای شدید رخ میدهد. سنسور اینرسی سرعت و زاویه تغییر چرخ در محور پیچ (Pitch) را ارزیابی میکند. پیش از آنکه زاویه به حد بحرانی برسد، با کاهش ملایم گشتاور پیشرانه، چرخ جلو به صورت بسیار نرم به زمین بازمیگردد.
سیستم کنترل پایداری بلند شدن چرخ عقب (Rear-Wheel Lift-Up Control)
در ترمزگیریهای شدید، وزن موتور به سمت چلو متمایل شده و تایر عقب تمایل به جدا شدن از زمین دارد. سیستم با تحلیل زاویه گام شاسی، فشار هیدرولیک ترمز جلو را اندکی تعدیل میکند تا چرخ عقب بر روی زمین باقی مانده و کنترل ترمزگیری حفظ شود.
سیستم کنترل لغزش چرخ عقب (Rear-Wheel Slide Control)
در موتورسیکلتهای مجهز اسپرت و مسابقهای، این سیستم به راکبان باسابقه اجازه میدهد تا در پیستهای مسابقه، چرخ عقب خود را تا زاویه مشخصی دچار لغزش کنترلشده (سرسرهبازی یا اسلاید) کنند. IMU با پایش مستقیم زاویه لغزش جانبی شاسی (Side-slip angle)، این مانور ایمن و هیجانانگیز را بدون ریسک سقوط مدیریت مینماید.
سیستم کنترل متناسب با شیب (Slope-Dependent Control)
این ماژول تشخیص میدهد که موتورسیکلت در شیب تند رو به پایین یا بالا در حال ترمزگیری است. در سرپایینیها، احتمال کله کردن بیشتر است و سیستم زودتر وارد عمل میشود؛ در حالی که در سربالاییها، فشار ترمز بهینهسازی میشود تا فاصله توقف کوتاه گردد.
سیستمهای مدرن لانچ کنترل (Launch Control) و کروز کنترل تطبیقی
سیستم لانچ کنترل به کمک پایش دادههای اینرسی، بهترین دور موتور و گشتاور را برای سریعترین شروع حرکت بدون هرزگردی چرخ عقب یا بلند شدن چرخ جلو در پیست مسابقات فراهم میسازد. از سوی دیگر، کروز کنترل تطبیقی مجهز به IMU، سرعت شاسی را حتی در زمان پیچیدن و خم شدن موتورسیکلت به صورت کاملاً نرم و یکنواخت کنترل میکند.
پدیده رانش (Drift) و خطاهای ذاتی سیستمهای اینرسیایی
اندازهگیری شتاب و سرعت زاویه توسط فناوریهای مینیاتوری MEMS با وجود مزایای بیشمار، عاری از نقصهای فیزیکی نیست. عملکرد سنسورها تحت تاثیر نویزهای لرزشی انجین موتورسیکلت و تغییرات دمایی قرار دارد.
تعاریف تکرارپذیری، پایداری و دریفت فیزیکی
در اصطلاحات فنی این حوزه، سه فاکتور به عنوان سنجههای کیفی خروجی سنسور مطرح هستند :
- قابلیت تکرار (Repeatability): توانایی سنسور در ارائه پاسخهای یکسان به ورودیهای کاملاً مشابه در شرایط محیطی یکسان.
- پایداری (Stability): توانایی تراشه در تحویل سیگنالهای کاملاً یکسان در شرایط ورودی ثابت با گذر زمان.
- دریفت یا رانش (Drift): تغییر تدریجی مقادیر خروجی سنسور در طول زمان، حتی زمانی که موتورسیکلت بدون حرکت و کاملاً بی دفاع است.
مهار خطاهای ریاضی به کمک فیلتر کالمن و GNSS
از آنجایی که موقعیت مکانی موتورسیکلت از طریق دو بار انتگرالگیری پیدرپی از مقادیر شتابسنجها به دست میآید، وجود یک بایاس ثابت یا دریفت جزئی در سنسور، خطای سرعت را با درجه دو و خطای مکانی را با سرعت درجه سه افزایش میدهد. برای حل این معضل فیزیکی، مهندسان سیستمهای ناوبری از تلفیق دادههای IMU با دادههای موقعیتیاب ماهوارهای (GNSS) به کمک یک فیلتر کالمن استفاده میکنند تا خطاهای سیستم برآورد، حذف و تصحیح گردند.
الزامات فیزیکی نصب و کالیبراسیون سنسور IMU
جهت بهرهگیری حداکثری از پتانسیل ایمنی و پایداری سیستم IMU در موتورسیکلت، رعایت استانداردهای فنی در نصب و جانمایی آن الزامی است.
مکانیابی بهینه روی شاسی و ایزولاسیون نویز
تراشه IMU معمولاً در مرکزیترین نقطه هندسی موتورسیکلت و در زیر صندلی راکب نصب میشود. این محل نصب به سنسور اجازه میدهد تا مرکز ثقل شاسی را با دقت بالاتری شبیهسازی کند. عدم هماهنگی دقیق زاویه مختصات سنسور با محورهای شاسی منجر به کدهای خطای محاسباتی سنگین در کامپیوتر مرکزی میشود.
طبق توصیههای فنی شرکت بوش برای سنسور سری MM7.10، ماژول نباید به گونهای نصب شود که کانکتورهای خروجی آن رو به بالا قرار گیرند؛ همچنین مهار نویزهای حرارتی و نوسانات دما در محل قرارگیری تراشه بسیار حائز اهمیت است. علاوه بر این، استفاده از پایههای ضربهگیر و لرزشگیرهای لاستیکی مانع از انتقال نویزهای فرکانس بالا (بین ۱۰ تا ۴۰ کیلوهرتز) انجین به سیستم شده و از اشباع زودهنگام سنسورهای خازنی جلوگیری میکند.

بازار ایران و تکنولوژی سنسور IMU؛ از رویا تا واقعیت در سایت زوموتور
تحولات قوانین استاندارد در صنایع داخلی کشور، واحدهای تولیدکننده موتورسیکلت را ملزم به رعایت استاندارد ترمز ضد قفل (ABS) یا ترمزهای ترکیبی (CBS) کرده است. با این حال، باید درک واقعبینانهای از تفاوت سیستمهای پایه جادهای و سیستمهای مجهز به پلتفرم اینرسیایی وجود داشته باشد.
بررسی وضعیت ترمز ABS و سیستمهای پایداری در موتورهای بازار ایران
اکثر موتورسیکلتهای زیر ۴۰۰ سیسی موجود در بازار کشور نظیر بنلی دو سیلندر نیوفیس Benelli 250S یا نمونههای ادونچر اقتصادی مثل SYM NH 250 مجهز به سیستم ترمز ABS دو چرخ یا سیستم ترکیبی هستند. این سیستمها اگرچه امنیت توقف در سطوح بارانی و لغزنده را ارتقا میدهند، اما فاقد هرگونه سنسور IMU فیزیکی هستند. این بدان معناست که در پیچهای تند، ترمزگیری ناگهانی با این موتورسیکلتها همچنان با خطر انحراف شاسی همراه است.
به عنوان نمونه، در موتور کروزر باجاج اونجر Bajaj Avenger 220 که از سیستم انژکتور بوش آلمانی بهره میبرد، ترمز ABS تک چرخ جلو تعبیه شده است و راننده باید بدانید که عدم توازن نیرو در زمان ترمزگیری در شرایط پیچ، میتواند ایمنی او را به شدت تهدید کند. موتورسواران این دسته از کلاسها همواره باید متدهای ترمزگیری صحیح را رعایت کرده و نیروی اصلی ترمز را در مسیرهای مستقیم اعمال کنند.
چشمانداز ورود تکنولوژیهای هوشمند به موتورسیکلتهای زیر ۴۰۰ سیسی
خوشبختانه روند ارزانسازی و سبکسازی سنسورهای پایداری توسط شرکت بوش آغاز شده است. بوش با ارائه نسخه پایه سیستم کنترل پایداری در جفت با پمپهای ترمز سبکتری مانند ABS 10، تلاش دارد این ایمنی فوقالعاده را به کلاسهای موتورسیکلتهای زیر ۴۰۰ سیسی نظیر تیویاس آپاچی TVS Apache RTR 310 تعمیم دهد. ورود این مدلها در آینده نویدبخش کاهش جدی سوانح جادهای برای راکبان موتورسیکلتهای میانرده خواهد بود.
نتیجهگیری و جمعبندی فنی در مورد سنسور IMU
سنسور IMU در موتورسیکلت از یک ماژول ناوبری ساده به هسته مرکزی هماهنگکننده پایداری و ایمنی در جادهها و پیستهای مسابقه بدل شده است. این پلتفرم فیزیکی با نمونهبرداری مستمر و صدمثانیهای، ترمزگیری در پیچها، شتابگیریهای هیجانانگیز خروجی پیچ، کنترل گشتاور و هندلینگ سیستم تعلیق را به صورت یکپارچه مدیریت میکند.
درست است که وجود سیستمهای پایداری الکترونیکی به هیچ عنوان قوانین فیزیک را نقض نمیکنند و اشتباهات بسیار شدید رانندگی را کاملاً خنثی نمیسازند، اما همانند یک «فرشته نگهبان نامرئی»، محدوده خطا پذیری راکبان را افزایش داده و تجربه راید را لذتبخشتر و ایمنتر مینمایند. برای مخاطبان زوموتور، آشنایی با تفاوتهای ساختاری این حسگرها ابزاری ارزشمند در جهت ارزیابی صحیح مشخصات ایمنی و انتخاب هوشمندانه موتورسیکلت بعدی خواهد بود.
سوالات متداول درباره سنسور IMU موتورسیکلت
تفاوت کلیدی ترمز ABS معمولی با Cornering ABS مجهز به IMU چیست؟
ترمز ABS معمولی تنها سرعت دوران چرخها در خط مستقیم را میسنجد. در مقابل، سیستم Cornering ABS با دریافت اطلاعات زاویه خوابیدن موتورسیکلت از سنسور IMU، فشار روغن هیدرولیک کالیپر ترمز را به طور ایمن در میانه پیچ تعدیل میکند تا چسبندگی جانبی حفظ شود.
آیا موتورسیکلتهای مونتاژ داخل کشور نیز به سنسور IMU مجهز هستند؟
بسیاری از موتورسیکلتهای زیر ۴۰۰ سیسی مونتاژ داخل نظیر Benelli 250S یا SYM NH 250 فاقد سیستم IMU در موتورسیکلت بوده و صرفاً به ترمزهای دیسکی با سیستم ABS یا CBS سنتی متکی هستند. این فناوری در حال حاضر عمدتاً بر روی موتورسیکلتهای وارداتی حجم بالا و کلاس پرچمدار تعبیه میشود.
سنسورهای اینرسی چگونه خطای ناشی از لرزشهای شدید انجین را مهار میکنند؟
تراشههای MEMS از الیاف الاستیک و فنرهای سیلیکونی با دوام بهره میبرند که خستگی مادی ندارند. علاوه بر این، استفاده از کیتهای لرزشگیر لاستیکی در محل شاسی و فیلترهای پایینگذر دیجیتالی (مانند فیلتر ۱۵ هرتز در مدل MM5.10)، تاثیر نویزها و فرکانسهای مخرب موتور را خنثی میسازد.
پدیده رانش یا دریفت (Drift) در سنسور پایداری چیست؟
دریفت به معنای تغییر نامطلوب و خطای تدریجی در خروجی شتابسنج یا ژیروسکوپ به مرور زمان و بدون اعمال ورودی واقعی است. به دلیل انتگرالگیریهای متوالی، این خطاها بزرگ شده و پایداری ناوبری را از بین میبرند که با الگوریتم فیلتر کالمن تصحیح میگردد.
رفیق خیلی خوشحال میشیم نظر یا تجربتو در مورد این محتوا بدونیم. پس هر کامنتی داری توی قسمت دیدگاه های همین پایین سایت بذار تا هم ما استفاده کنیم هم بقیه. راستی اگر شماره همراهتو بذاری به محض جواب دادن به کامنتت توسط زوموتور، از طریق اس ام اس باخبر میشی. یادت نره، اطلاعاتت پیش ما محفوظه! مرسی که زوموتور رو دنبال میکنی. ❤️
راستی ما کلی اطلاعات و محتواهای جذاب تو حوزه موتورسیکلت رو در شبکه های اجتماعی زوموتور مثل یوتوب بارگذاری میکنیم که میتونه خیلی براتون مفید باشه پس حتما مارو در فضای مجازی دنبال کنید.






